
UAS-LiDAR Acquisition for 3D Survey of the Valdaro River Port in Mantua
Initial Testing by Politecnico di Milano in the Hymantovalley Area

Scientific Directors: Luigi Fregonese, Andrea Adami, Daniele Treccani
Collaborator: Yuwei Cao, Jacopo Helder, Laura Taffurelli, Luca Valisi, Carmelo di Rosa
Partners: Provincia di Mantova, SPV- Servizi Portuali Valdaro S.r.l.
Contacts: unescolab-mantova@polimi.it
Project year: 2024
The UNESCO Research Lab team carried out a first test for the monitoring and 3D surveying of the river port in Valdaro, part of the Hymantovalley area.
Politecnico di Milano is a scientific partner of the European project, which is part of the I3 Interregional Innovation Investments Program. The project aims to develop an area for hydrogen production, storage, transportation, and utilization for heat, energy, and mobility.
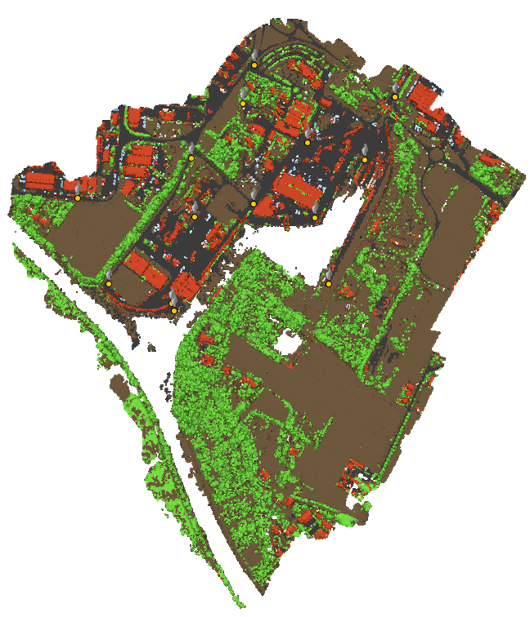
The primary objective of this task was to test a LiDAR-SLAM system mounted on a UAS (drone) to dynamically acquire the 3D geometry of the port area, including the railway junction, architectural elements, and the three-dimensional development of the area.
The term “LiDAR-Slam” stands for Light Detection and Ranging-Simultaneous Localization and Mapping, which is a technology that combines LiDAR with inertial sensors to accurately reconstruct the acquisition trajectory, and capable of generating a 3D point cloud of the environment surrounding the UAS while it was in flight.
Through collaboration with the Experimental Laboratory System of the DASTU Department at Polimi, the high-resolution mobile scanning system Hovermap ST by Emesent was used, mounted on the Unesco Research Lab’s DJI Matrice 300 RTK drone. This allowed for the acquisition of 3D point clouds. The UAS was used coupled with a base station mounting a GNSS (Global Navigation Satellite System) receiver. This allowed for the proper georeferencing of the resulting point clouds.
The flight mission was carried out at an altitude of 35 meters, at a maximum speed of 2m/sec. The portable mobile mapping system Hovermap ST instrument can acquire around 600,000 points per second, with a double return signal that allows ground points to be detected even in the presence of vegetation and a declared accuracy of 2-3 cm in a general environment.
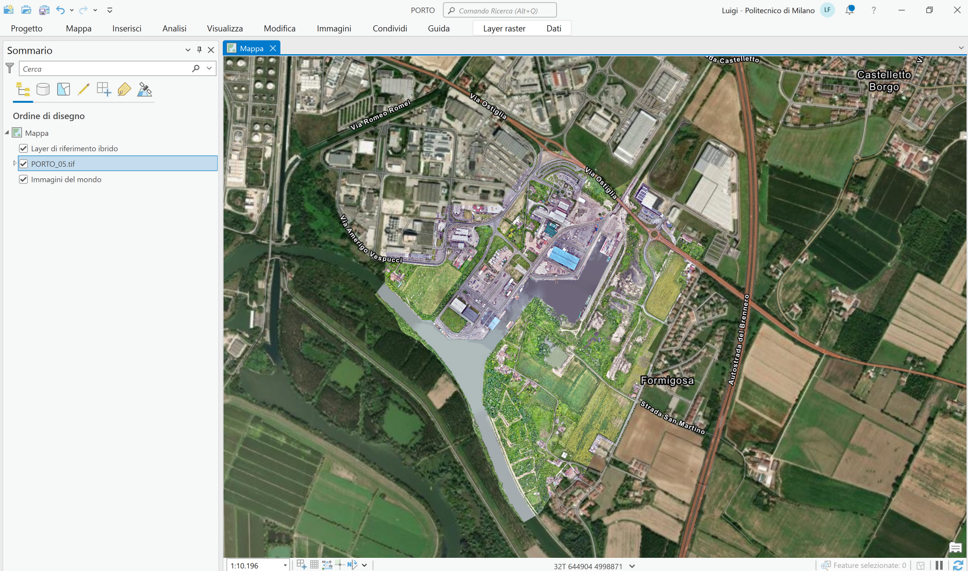
Simultaneously, a photogrammetric documentation flight was carried out with a UAS DJI Mavic3 to create a metrically accurate orthophoto of the port area, with a ground pixel resolution of 5 cm.
In the future, other types of LiDAR and sensors will be tested for 3D surveying of the entire Hymantovalley area, for monitoring temporal transformations.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}